Probramation Hors-Ligne
La Programmation hors-ligne (Offline Programming) consiste en programmer les robots sans la nécessité d'arrêter le robot, hors de l'environnement de production. La Programmation hors-ligne permet de réduire le temps de programmation robot avec un logiciel de simulation. Ceci permet d'évaluer plusieurs scénarios avant de construire la cellule automatisé et d'éviter les erreurs faits par méthodes d'apprentissage traditionnels.
La Programmation Hors-Ligne Permet de Maximiser Le Retour D'Investissement de Robots Industriels。
Programmation Hors-Ligne Avec Robodk
La Programation Hors-Ligne N'a Pas De Limites Avec Le Logiciel Robodk。La Simulation Et Programmation de Robots Industriels EstTrèsCapileAvec L'Interface D'Unitisateur Graphique(GUI)Robodk。Robodk权限D'éviterlessingularitésetles限制Des轴。IL N'est PasNécessaired'AvoirExpérienceen Probramation。Visitez la section deProbramation Hors-Lignede la文件倒加d'信息。
Avec La Api de Robodk Il Est Aussi可能是De Partreadmer des Robots Avec Python。PythonEST UN Langage De Programation Qui Permet LaIntégrationdeFaçonRapideet Facile。EN比较AVEC D'Autres Langages De Programation,Python权限D'Arriver AuMêmeRésultatAvec Moins Lignes De Code。
voir la section de laAPI de RoboDK倒加d'信息。La Api de Robodk Est AussiDisplonible en C#et.马铃薯草。
Exemple de Programation Hors-Ligne:
从robolink从RoboDK进口* # de RoboDK APIimport * # Toolbox pour la robotique # Démarrer la API de RoboDK: RDK = Robolink() # Prendre le robot (premier robot trouvé): robot = RDK.Item('', ITEM_TYPE_ROBOT) # Prendre la cible: target = RDK.Item('Target 1') target_pose = target.Pose() xyz_ref = target_pose.Pos() # Bouger le robot à la cible: robot.MoveJ(target) # Déssiner un hexagone autour de la cible: for i in range(7): ang = i*2*pi/6 #ang = 0, 60, 120, ..., 360 # Calculer la nouvelle position: x = xyz_ref[0] + R*cos(ang) # nouvelle coordonnée X y = xyz_ref[1] + R*sin(ang) # nouvelle coordonnée Y z = xyz_ref[2] # nouvelle coordonnée Z target_pos.setPos([x,y,z]) # Bouger à la cible: robot.MoveL(target_pos) # Appel de fonction à la fin du programme robot.RunCode('Program_Done') # Bouger le robot au point de départ: robot.MoveL(target)
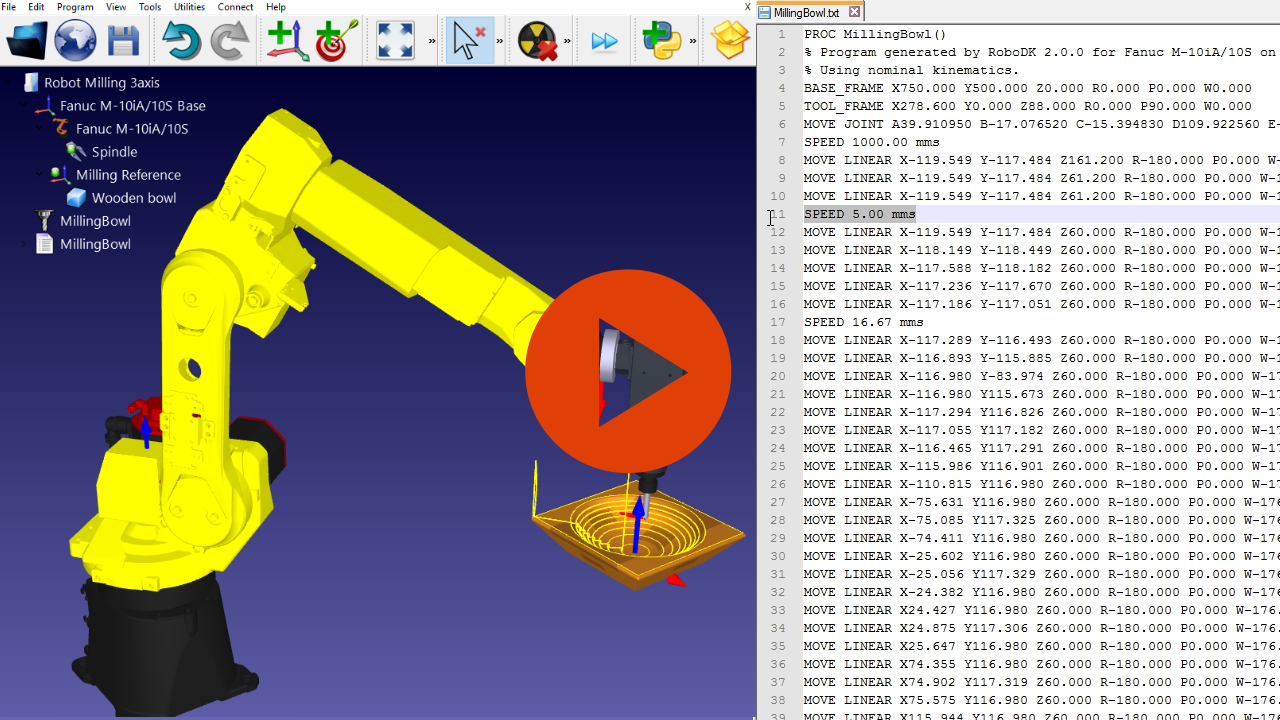
Une Fois在ObtenuLeRésultatDésiréDansLaSimulation IlEstTtèsCapiledénérerLeSlogsRobot Hors-Ligne。Par Exemple,Le Program Suivant SeraGénéré倒入联合国机器人ABB。
Résultatde la Programation Hors-Ligne:
模块Mod_hexagonPath Proc Hexagonpath()!ProgramGénéréAvecRobodk倒入ABB IRB 1600ID-4 / 1.5。日期29/11/2014 17:42:31 Confj \ On;合并;rdktool.tframe:= [ - 4,0,371.3],[0.92387953,0,0.0.38268343,0];movej [[1010.634,-114.491,662.29],[0,0,1,0],[ - 1,0,-1,0],rdkextax,rdkspeed,rdkzone,rdktool,\ wobj:= rdkwobj;MOVEL [[810.634,-114.491,662.29],[0,0,1,0],[ - 1,0,-1,0],RDKEXTAX,RDKSPEED,RDKZONE,RDKTOOL,\ WOBJ:= RDKWOBJ;MOVEL [[910.634,58.715,662.29],[0,0,1,0],[0,-1,0,0],RDKEXTAX,RDKSPEED,RDKZONE,RDKTOOL,\ WOBJ:= RDKWOBJ;Movel [[1110.634,58.715,662.29],[0,0,1,0],[0,-1,0,0],rdkextax,rdkspeed,rdkzone,rdktool,\ wobj:= rdkwobj;MOVEL [[1210.634,-114.491,662.29],[0,0,1,0],[ - 1,0,-1,0],RDKEXTAX,RDKSPEED,RDKZONE,RDKTOOL,\ WOBJ:= RDKWOBJ;MOVEL [[1110.634,-287.696,662.29],[0,0,1,0],[ - 1,0,-1,0],RDKEXTAX,RDKSPEED,RDKZONE,RDKTOOL,\ WOBJ:= RDKWOBJ; MoveL [[910.634,-287.696,662.29],[0,0,1,0],[-1,0,-1,0],rdkExtax], rdkSpeed, rdkZone, rdkTool, \WObj:=rdkWObj; MoveL [[810.634,-114.491,662.29],[0,0,1,0],[-1,0,-1,0],rdkExtax], rdkSpeed, rdkZone, rdkTool, \WObj:=rdkWObj; Program_Done; MoveL [[1010.634,-114.491,662.29],[0,0,1,0],[-1,0,-1,0],rdkExtax], rdkSpeed, rdkZone, rdkTool, \WObj:=rdkWObj; ConfJ \On; ConfL \On; ENDPROC ENDMODULE
后处理机器人
UN Producteure Robot Robot De Traduire Le Langage DeProgrammationGénériqueVers UntContrôleurSpécifique。LA转换D'UNE模拟àunctrôleur机器人SpécifiqueSEFAITAVEC联合国后处理器。Les Post Processeurs Robodk Permettent LaFlexibilitédeGénérerdedress程序机器人倒入des BesoinsSpéciques。
La Plupart des Marques机器人Sont Dixonibles Disonibles Dans Robodk。Visitez La Section.后处理de la文档倒加d'信息。