Robodk bobcad-cam加载项
Bobcad-CAM的Robodk加载项使您可以直接从山电脑软件快速设置机器人加工项目。借助Bobcad-CAM软件的Robodk集成,您可以轻松地将Bobcad-CAM加工软件与Robodk相结合,以模拟和编程机器人加工的工业机器人武器。
借助此山坡加载项,您可以直接从山顶CAM软件中轻松生成无错误的程序。另外,Robodk还支持APT CLS和G代码加工文件。
有关机器人加工的Robodk的更多爱游戏ayx高尔夫球信息可在机器人加工部分。通过访问访问Bobcad-Cam软件的更多信息山电网站。
本文档介绍了如何为Bobcad-Cam软件设置Robodk插件。
请按照以下步骤安装bobcad-cam的Robodk addin。确保使用Bobcad-Cam v3.4或更高版本。
1。打开Robodk中的文件夹BOBCAD-CAM插件文件夹:
c:/robodk/erther/plugin-bobcadcam
另外,您可以下载bobcad-cam的Robodk插件:
//www.x7093.com/files/upload/bobcad-cam-robodk-plugin.zip
并将插件标记为安全:
右键单击邮政编码文件夹,选择特性并检查选项Unblock。
2。运行install.bat文件。
如果运行install.bat文件失败,则可以将zip文件夹的内容提取到文件夹:
C:\ bobcad-cam数据\ bobcad-cam v34
或您的等效安装目录。如果需要,将内容合并。
3。重新启动Bobcad-CAM软件。
插件安装文件夹应如下图所示。

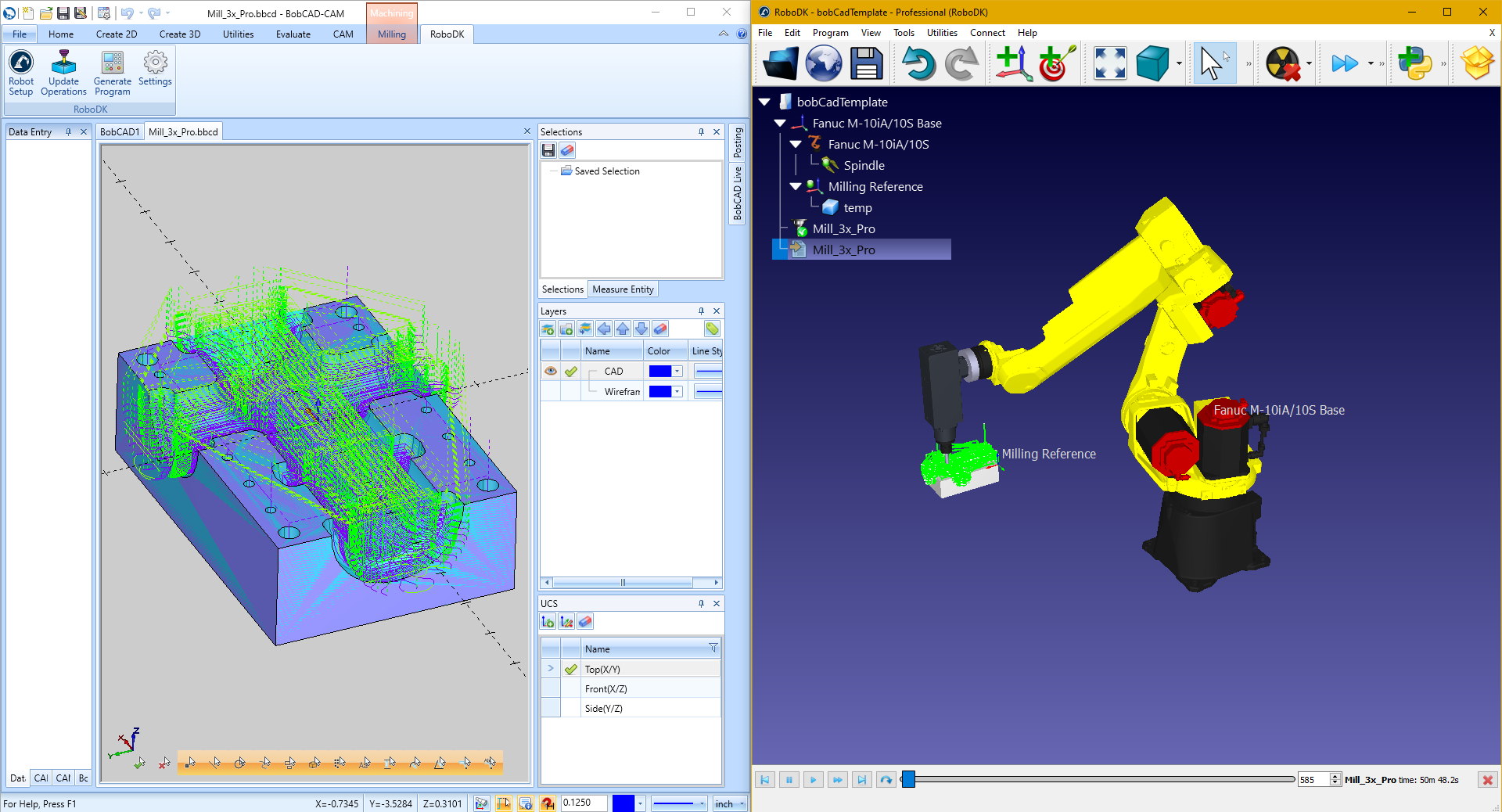
当您打开Bobcad-Cam软件时,您应该看到一个Robodk工具栏。选择此Robodk选项卡以查看在Robodk中设置机器人加工项目的可用选项。

这机器人设置![]() 按钮打开Robodk并打开一个默认的机器人加工项目,您可以使用机器人仿真和机器人加工项目。
按钮打开Robodk并打开一个默认的机器人加工项目,您可以使用机器人仿真和机器人加工项目。
您可以轻松更改机器人,修改工具和/或参考框架。例如,请按照以下步骤更改机器人:
1。右键单击机器人
2。选择更换机器人(如图所示)
3。选择新机器人
Robodk安装程序默认情况下仅提供一些机器人,但是,可以从该机器人下载更多机器人在线图书馆。
有关添加机器人工具的更多信息可在入门部分。
抓住Alt+Shift移动机器人工具(TCP)。这对于在教导目标之前设置机器人的姿势很有用。
保存项目以通过选择来保留更改文件➔保存站(CTRL+S)。
选择更新操作按钮将加工工具路径从Bobcad-Cam软件发送到Robodk。这将覆盖具有相同名称的所有现有机器人加工项目。
如果所选机器人可行,将显示绿色复选标记。如果有任何问题(例如奇异性,轴线限制或到达问题),将显示带有问题的消息。
双击机器人加工项目![]() 打开特定于一个操作的机器人加工设置。有关机器人加工设置的更多信息机器人加工部分。
打开特定于一个操作的机器人加工设置。有关机器人加工设置的更多信息机器人加工部分。
右键单击程序并选择跑为了模拟它(或双击程序)。您也可以选择生成机器人程序(F6)要获得需要加载在机器人控制器上的机器人程序。有关如何生成机器人程序的更多信息可在ayx官方离线编程部分。
如果需要,请右键单击程序并选择选择邮政处理器更改后处理器。此步骤可以帮助您自定义生成代码的外观。有关选择和自定义后处理器的更多信息,请提供后处理器部分。
一旦您的Robodk Station准备就绪,您可以直接从Bobcad-Cam软件生成机器人程序。为此,选择生成程序。此选项将根据您的Bobcad-CAM项目中定义的加工工具路径更新机器人程序。
在Robodk中按照以下步骤查看或修改机器人程序的位置:
1。选择工具选项
2。选择程序标签
3。选择放在里面机器人程序文件夹
选择设置按钮以打开与Bobcad-Cam的Robodk插件相关的设置。

除其他外,您可以修改以下选项:
1。使用Bobcad-CAM模板代替Robodk模板(Robodk中的3D导航和颜色模板将匹配Bobcad-Cam样式)。
2。每次发布新的加工操作时,加载并更新Robodk的零件。仅将加载可见的固体和表面。
3。检查选项反转机轴允许您自动考虑指向工具内侧的工具Z轴(而不是指向外部)。
4。使用G代码文件而不是APT文件。Robodk可以读取以下文件来生成机器人模拟和程序:
一种。易于文件(默认选项):在Robodk中加载Bobcad-CAM本机APT文件。这是大多数操作的首选方法。
b。G代码文件:生成G代码加工文件。请注意,此格式取决于您选择的后处理器,并且主要设计用于使用3轴加工工具路径。