ISO9283性能测试
ISO标准”ISO9283:操纵工业机器人-性能标准和相关的测试方法“描述测试来评估工业机器人的性能。除此之外,它还提供了程序正确测量机器人位置的准确性,重复性和路径精度。
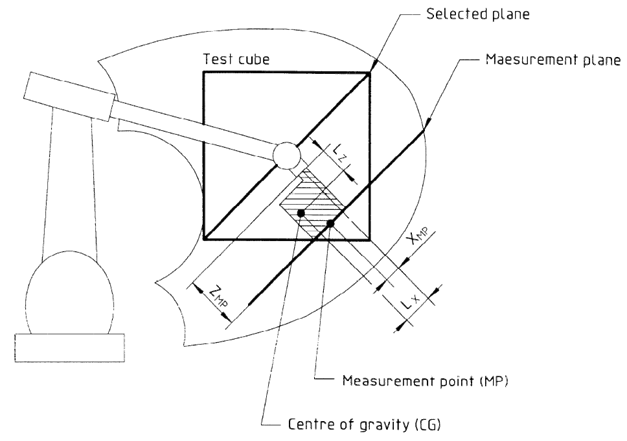
根据ISO9283规范,所有的测试应该执行内部所谓的ISO立方体试块。ISO立方体试块应该是最大的多维数据集,可以在机器人工作空间。此外,位置精度和可重复性应以五个不同配置的30倍。众所周知,5配置不足以提供一个适合现代机器人的测量精度。
大多数机器人制造商只提供机器人位置的准确性,如果机器人已经校准,此外,他们使用至少100个不同的配置来提供合适的位置精度统计数据。工业机器人是高度可重复但不准确;因此,工业机器人的精度可以通过校准得到改善。

典型的机器人工作空间在80年代典型的机器人工作空间的现代机器人
然而,ISO9283规范通常用于重复性和路径精度测试即使机器人没有校准。

建议观看以下视频路径与RoboDK精度测试:https://youtu.be/yMQjqAQY1iE。
RoboDK也可以用来校准机器人以及测试校准前后的表现。最后,RoboDK也可以用来测试机器人的精度校准通过ballbar测试之前和之后。
下列事项需要安装RoboDK和正确执行机器人路径精度测试:
1。一个或多个工业机器人手臂
2。任何激光跟踪测量系统:如徕卡、API或法和光学等CMM C-Track立体摄影机从Creaform应该工作
3所示。RoboDK软件必须安装和适当的许可证ISO9283测试是必需的。网络许可,需要互联网连接检查许可证。安装或更新的RoboDK ISO9283性能测试:
一个。从下载部分下载RoboDK
爱游戏ayx正网
b。建立测量系统的驱动程序(不需要Creaform光学CMM)。
解压缩复制相应的文件夹:
API激光跟踪器://www.x7093.com/downloads/private/API.zip(OTII和弧度追踪器)
法激光跟踪器://www.x7093.com/downloads/private/Faro.zip(所有法追踪器)
徕卡激光跟踪器://www.x7093.com/downloads/private/Leica.zip(所有莱卡追踪器)
文件夹:C: / RoboDK / api /
建议建立一个虚拟环境的设置在RoboDK(离线设置)准备路径和位置进行测试。这可以做过机器人和追踪,只有使用电脑RoboDK安装。RoboDK校准和路径验证设置例子可以从文件夹下载:
//www.x7093.com/downloads/calibration/
RoboDK实用程序来生成配置,推荐路径ISO9283如上所述的标准。使用该实用程序:
1。公用事业公司➔创建ISO 9283立方(目标和路径)
2。输入参考关节(机器人位置工具面临着追踪)
3所示。调整位置和大小的立方体
4所示。选择OK
这将创建ISO标准描述的5目标以及路径推荐路径精度测试。这些目标和路径保持在一个立方体坐落在机器人的前面。我们可以设置所需的数据集以及移动中心(目标“ISO p1”)和参考关节定义路径的方向。也可以最大化立方体大小找到最大的多维数据集符合机器人工作空间。


样品台机器人与机器人校准和验证选项如下图所示。

相同的程序用于位置精度验证机器人校准期间还可用于位置精度测试。Repeataiblity统计也可以获得,如果测量顺序通过同一组点。执行的唯一区别只是验证或校准和验证是第一个选项不需要机器人校准许可证。
执行这种验证你应该选择菜单:
●公用事业公司➔测试位置的准确性和可重复性(ISO 9283)

这些测试需要识别机器人基础坐标系的测量参考坐标系(基本设置)和工具坐标系与机器人法兰(工具设置)。
可以获得一个PDF报告时的位置精度和可重复性测试完成。
执行路径精度测试,需要用RoboDK创建一个机器人程序,如ISO9283创建的项目创建ISO立方体效用。我们可以生成特定于供应商的机器人程序通过选择程序和按F6(或选择程序➔生成程序)。或者,可以使用任何其他程序中创建RoboDK(如直线、圆形或正方形)。
它也需要一个测量系统,可以跟踪终端执行器的位置,并提供测量对参考系的位置。应使用基础设置和工具安装程序RoboDK(需要执行校准或位置精度测试)来识别机器人基础坐标系和工具坐标系。
测量数据时必须获得移动机器人沿着计划。测量应连续记录,使用默认的软件制造商提供的测量系统。应将测量导出为CSV或TXT文件。这些文件必须包含XYZ位置数据以及每个测量的时间戳。可选地,可以包含这些测量工具对机器人的方向。

开始在RoboDK路径验证项目:
1。选择工具➔测试路径的精度、速度和加速度(ISO 9283)
2。从下拉菜单选择程序用于验证
3所示。用于测量提供参考框架
4所示。通过选择导入测量数据添加测量数据。或者,可以拖放和CSV或TXT文件包含测量路径验证窗口。
最后,选择PDF报告与一些统计数据和图形生成PDF的路径精度,速度和加速度。可以多次运行相同的测试在不同条件下(不同的速度,不同的舍入/转弯的价值观,不同的载荷,…)来比较这些参数在相同的报告。
测量分可以显示在紫。这些测量应配以黄色的路径描述理想的路径,机器人必须遵守。RoboDK提供的统计数据是这两条路径之间的区别。
如果参考系没有正确地定义不匹配的测量点黄色的道路。由于几个原因,这可能发生,例如坏参考系的定义或定义一个不同的工具。在这种情况下选择调整参考将尝试最适合两条路径,以便提供的统计数据隔离这些失调。

一旦路径精度试验完成后可以获得一个PDF报告通过选择PDF报告从路径验证窗口。这将生成PDF和一些统计数据和图形的路径准确性、速度和加速度。
样品测试的结果在前面几节以下图片所示。在这个例子中,ISO9283程序是运行在两个不同的模式:
●手动模式在75 mm / s的速度
●以300毫米/秒速度自动模式


在这个例子中,两个程序都使用生成的好精度选择。这意味着机器人将停在每一个点的路径尽可能准确。在这种情况下,它是典型的观察沿着路径因为高加速和减速的速度必须是零每一行的末尾或圆运动(角落)。
大多数机器人品牌提供排选项,以避免这种影响通过平滑边缘。例如,ABB称之为ZoneData并允许指定一个区域控制器的精度可以磨平你的棱角,发那科称之为问,允许指定的百分比的平滑与速度成正比,库卡选项提供了预先指令C_DIS旗和美元万能机器人允许指定一个混合半径为光滑的边缘)。
因此,准确度测试允许的路径找到一个好的妥协之间保持一个平稳的速度,同时保持可接受的精度水平接近边缘的路径。
可以指定舍入参数RoboDK以及程序的速度。编辑程序对于这样一个测试:
1。右键单击该项目
2。选择Show指令
3所示。选择第一个或第二个指令
4所示。选择程序➔组舍入指令指定一个四舍五入的准确性
5。选择程序➔设置速度指令指定的速度
